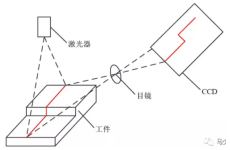
在三维视觉测量系统中,对仪器参数的标定是首先需要解决的难题,而对投影仪的内外参数标定是三维结构光测量系统中不可或缺的一部分。就目前而言,投影仪的参数标定还存在着标定精度偏低、方法单一、可操作性差等问题...
”三维视觉 结构光 投影仪标定 极线原理“ 的搜索结果
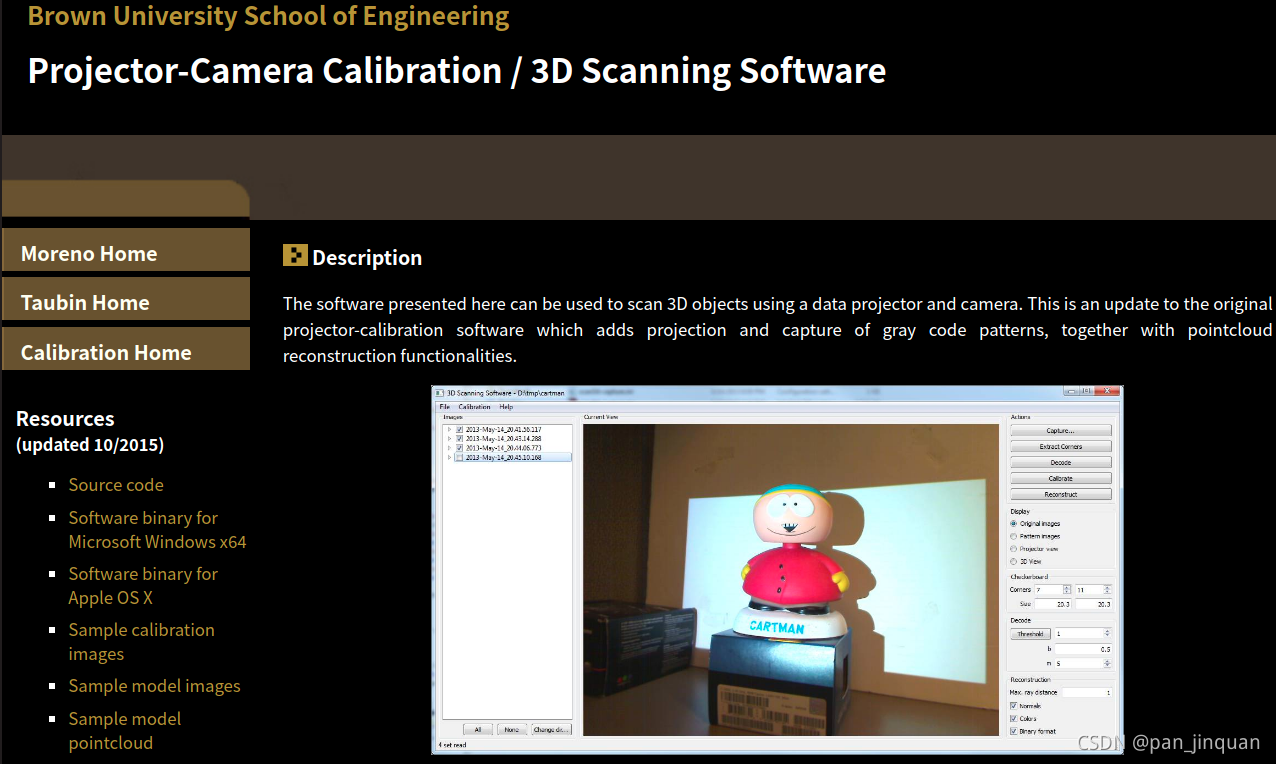
相机标定,投影仪标定,系统标定 基本matlab版本相位编码与解码 基于c++版本相位编码与解码 这段代码主要是实现了相移+格雷码编码与解码以及三频四相编码与解码的功能。 ----一下内容来源于AI对源码的解读,仅供参考...
标定是结构光三维立体视觉测量系统中的关键一步,标定的准确性对测量系统至关重要。基于镜头的畸变规律,提出了一种新型的系统标定方法,即以光轴为中心分隔同心圆环,形成多个子标定区域,通过反向投影标定法一一...
详细介绍了投影机模型,并提出一种简单、高精度的投影仪参数标定算法,该算法将投影仪当作一个逆向的相机,使用一块带有圆形标志点的平面标定板对投影仪进行标定。标定过程中,使用两组不同方向的光栅图像建立投影仪图像...
在结构光三维轮廓测量系统中,对参数的标定是测量的首要关键技术,但投影仪参数的标定目前还存在着标定精度低等问题。提出了一种简便、高精度的投影仪标定方法,该方法通过投影圆点图案到一块本身带有圆形标志点的...





系统参数的标定是结构光三维测量系统工作的基础,且参数标定的精度直接影响测量的精度,其中投影仪目前还存在标定过程复杂、精度较低等问题。为解决该问题,通过投影一组圆阵图案到一块本身带有特征圆的平板上,并由...




建立了基于光平面约束的水下结构光测量模型,并从理论上证明了当投影仪垂直于折射平面投射且光平面经过投射光轴时,陆上投射光线与投影光轴构成的空气中的光平面以及水下折射光线与折射平面法向量构成的水下光平面为...

单相机-投影仪的结构光三维重建系统中,投影仪标定是必不可少的步骤。通常,会将投影仪当作逆向的相机来进行标定。下面,将会介绍几种投影仪标定方法。 相位法(精度高、实现较难) 该种方法将投影仪当作逆向...


针对单个模组,可得到4点的投影面坐标(已知投影面长宽,后续可以设置归一化因子,通过深度值计算得出投影面长宽)和对应的深度图(图像uv)坐标及深度值,可通过求解PnP问题计算Rt矩阵,OpenCV中cv::solvePnP,使用...




基于传统双目的结构光三维测量技术,结构光编码提供相位特征,双目相机以相位为基准进行双目匹配,然后通过传统双目约束实现三维点的恢复。

推荐文章
- I2C知识大全系列六 —— I2C应用之Linux下的I2C_linux控制i2c应用编程-程序员宅基地
- 微擎URL路由_noloading: true, noredirect: true-程序员宅基地
- 关于arduino程序编译成功但上传失败的情况_arduino编译完成但上传错误-程序员宅基地
- 机器学习中的数据预处理_机器学习数据预处理顺序-程序员宅基地
- 谈一次java web系统的重构思路_java web 如何做系统重构-程序员宅基地
- 如何一文认识 AngularJS_angularjs理解-程序员宅基地
- 编写C语言程序,输入每个学生的学号和身高,保存在二进制文件中,并统计每个身高的人数打印出来...-程序员宅基地
- R语言 最优子集选择与K折交叉验证_最优子集法做交叉验证-程序员宅基地
- antd From 中 Form.Item里含有自己封装的组件,获取不到值的解决方法_from.item 拿到组件无法获取参数-程序员宅基地
- 爬虫的基本原理-程序员宅基地